
PIC16F84A Mikrodenetleyici ile DC Motor Hız Kontrol ve Devir Yönü Değiştirme Uygulama Devresi ve Program Kodu
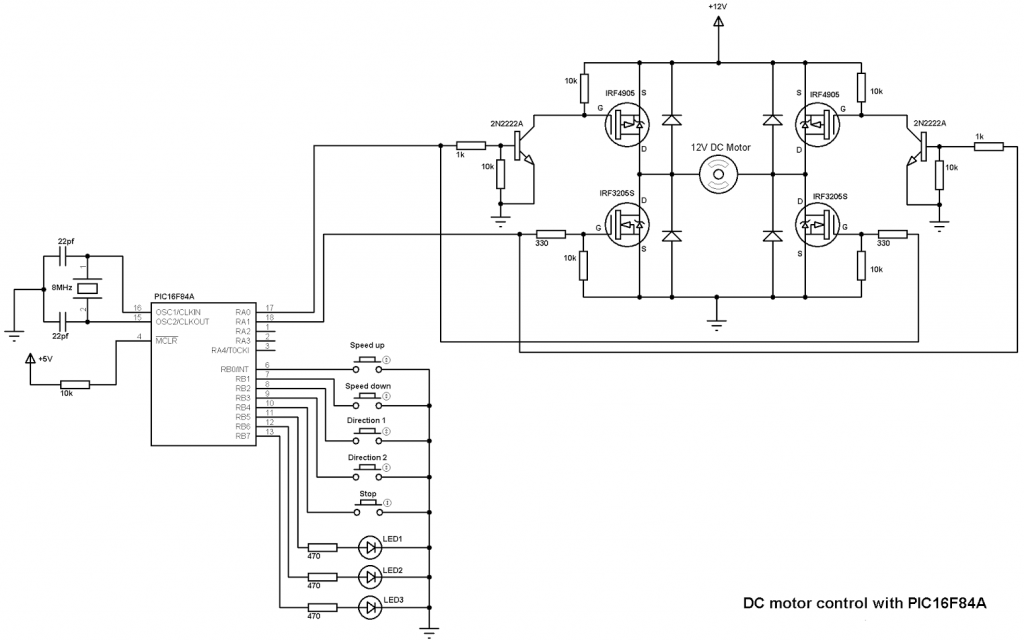
Yukarıdaki devrede PIC16F84A Mikrodenetleyici ile yapılan DC Motor Hız Kontrol ve Devir Yönü Değiştirme Uygulama Devresi görülmektedir.
Bu devrede Speed UP yazan butona basıldığında motor devri artarak hızlanmaktadır. Speed DOWN yazan butona basıldığında motor devri azalarak yavaşlamaktadır. Bu butonlara basarak motorun hızını istediğimiz gibi artırıp yavaşlatmak mümkündür. Motor maksimum hızına geldiğinde LED3 lambası yanmaktadır.
Direction1 ve Direction2 butonları devir yönünü değiştirmektedir. Değişen devir yönünde de Speed UP ve Speed DOWN butonları ile hız kontrolü yapılabilir. Devir yönüne göre LED1 ve LED2lambaları yanmaktadır.
PIC16F84A Mikrodenetleyici CCS C kodu
1 // DC motor speed and direction control using PIC16F84A CCS C code
2 // İçeriğe ulaşabilmek veya forumu aktif kullanabilmek için öncelikle GİRİŞ yapmalısınız, Üye değilseniz KAYIT olmalısınız
veya aradığınız konu hakkında ElektroBLOG sayfalarımızdan arama yapabilirsiniz
3 #include <16F84A.h>
4 #fuses HS,NOWDT,PUT,NOPROTECT
5 #use delay(clock = 8000000)
6 #use fast_io(B)
7 #use fast_io(A)
8 #use pwm(output = pin_a0, output = pin_a1, timer = 0, frequency= 500Hz, duty = 0)
9
10 unsigned int8 i = 1;
11 void main() {
12 port_b_pullups(TRUE); // Enable PORTB pull-ups
13 output_a(0); // PORTA initial state
14 set_tris_a(0); // All PORTA pins are configured as outputs
15 output_b(0); // PORTB initial state
16 set_tris_b(0x1F); // Configure RB0 to RB4 as inputs
17 pwm_off(); // Turn off all pwm outputs
18 while(TRUE) {
19 if(input(PIN_B0) == 0){ // If RB0 button pressed
20 i++; // Increment i by 1 (i = i + 1)
21 if(i > 99){
22 i = 100;
23 output_high(PIN_B7);} // RB7 LED ON
24 pwm_set_duty_percent(i * 10UL); // Duty cycle change in tenths %
25 delay_ms(100); } // Wait 100ms
26 if(input(PIN_B1) == 0){ // If RB1 button pressed
27 output_low(PIN_B7); // RB7 LED OFF
28 i--; // Decrement i by 1 (i = i - 1)
29 if(i < 1)
30 i = 1;
31 pwm_set_duty_percent(i * 10UL); // Duty cycle change in tenths %
32 delay_ms(100); } // Wait 100ms
33 if(input(PIN_B2) == 0){ // If RB2 button pressed
34 if(input(PIN_B5) == 0){
35 output_low(PIN_B6); // RB6 LED OFF
36 pwm_off(); // Turn off pwm for both outputs
37 output_a(0); // PORTA pins low
38 delay_ms(100); // Wait 100ms
39 pwm_on(PIN_A0); // Turn pwm on at RA0
40 output_high(PIN_B5); // RB5 LED ON
41 if(i > 99)
42 output_high(PIN_B7);}}
43 if(input(PIN_B3) == 0){ // If RB3 button pressed
44 if(input(PIN_B6) == 0){
45 output_low(PIN_B5); // RB5 LED OFF
46 pwm_off(); // Turn off pwm for both outputs
47 output_a(0); // PORTA pins low
48 delay_ms(100); // Wait 100ms
49 pwm_on(PIN_A1); // Turn PWM on at RA1
50 output_high(PIN_B6);
51 if(i > 99)
52 output_high(PIN_B7);}}
53 if(input(PIN_B4) == 0){ // If RB4 button pressed
54 pwm_off(); // Turn off pwm for both outputs
55 output_a(0); // PORTA pins low
56 output_b(0);} // PORTB pins low
57 }
58 }
Konu adı: PIC16F84A Mikrodenetleyici ile DC Motor Hız Kontrol ve Devir Yönü Değiştirme Uygulama
Yazan: zorbey
Kaynakça: Teknik Paylaşım Platformu

 Alıntı ile Cevapla
Alıntı ile Cevapla
